This is the first part of at least a 3 part post. I could write one giant novel of a post, but then I don't think as many people would read it, and this way I can break things into logical chunks, so people who understand one subject (IE WAAS) don't have to read that.
GNSS Basics
GNSS stands for Global Navigation Satellite Systems. That means there are signals coming from satellites that help you know where you are. In the USA there is the GPS system, Russia provides GLONASS, China is building Beidou and the EU is building Galileo. While they all generally do the same thing, they all do it slightly differently, and on a slightly different radio frequency. All the systems do is tell you what time the satellites think it is, very accurately.
I'll say GPS, when I mean any of the GNSS systems, just to make things consistent and short.
All the GPS systems do, is tell you where the satellites are at the moment they sent the time. Since all they do is tell you what time it was when the signal was transmitted. When the GPS receiver hears the message containing the time, and the location, it can calculate how far away the satellite was when the signal was transmitted. Knowing how far away the receiver is from 3 points will give a pretty good idea of where the receiver is. Knowing how far away from 4 or 5 satellites will give even more accuracy, indicating elevation, as well as position on the surface of the earth.
Since the receiver doesn't really know where it was when it was turned on, it needs a couple minutes to figure out all the possible positions it could be based on the number of receivers it can hear, and how far away from them it is.
Radio signals are pretty reliable, but sometimes they are interrupted, or bounce around. Ever have some ghosting images on a TV from signals being delayed to the TV receiver? The same thing can happen with GPS receivers. Various atmospheric conditions can delay or accelerate signals. Close to the ground in an urban setting can be the worst, since the signals will bounce off of buildings and vehicles making the receiver work extra hard to figure out where it is. If a signal just doesn't make any sense to the receiver, it can reject that signal.
The satellites are moving at around 17000mph, the earth is turning at about 650 mph and the receiver may also be moving. The earth is not round, it is egg shaped (average). The math gets quite complicated. There are some handy mostly simple formulas to get latitude/longitude math at
http://williams.best.vwh.net/avform.htm. Add in some other math to calculate the movement, and now things get all kinds of fun.
Since everything is moving, sometimes several satellites will not be in optimum positions to let the receiver hear them. Some be very close together, straight up, or some may be close to the horizon. If they are all bunched up in the sky, their time will all be the same, and it will be hard to differentiate between the signals. Likewise when the satellites are close to the horizon, they will subject to more interference, either through buildings or mountains.
The GPS constellation has about 32 active satellites. That means 16 are on this side of the earth and 16 are on the other side. Actually it will be maybe 12, since probably 4 of the 16 are too low on the horizon just rising, or just setting. Sometimes too, the satellites are having maintenance done on them, with software upgrades, or other tests. Hearing 8 satellites in any day is a really good place to be.
Because of the dynamic nature of the satellite constellation and the earth, and the vehicle we may be in, sometimes we don't get a good signal. The quality of the signal can be predicted. The FAA provides a
web site that will show the current and future signal quality for the USA. If you use java in the browser the tool is very dynamic:
http://www.raimprediction.net/applet.php Looking at the top of the page, there are also summaries. When they show a red area, that means the accuracy quality worst case is not able to be met for that time period. The 3 levels they show are enroute = 2miles, terminall=1mile, NPA=0.3 miles.
GPS is giving the position of the receiver in 3 dimensions. GPS can calculate latitude, and longitude as well as altitude. If the latitude is off by 0.3 miles, that means the altitude is also off by around 0.3 miles, or 1500 feet. Vertical guidance by GPS seems a huge challenge. Many aircraft receivers have an option for barometric aiding. The altimeter in the aircraft works by measuring changes in barometric pressure. The same concept can be used with the GPS receiver. By feeding the receiver with a know barometric pressure, it can more accurately calculate altitude.
Various GPS receivers are available in the aviation market that are built to various standards. Most of the early GPS receivers installed in aircraft were certified to a TSO C-129 standard. Some aircraft may have TSO C-196 standard receivers as well. The C-129 and C-196 receivers are able to receive GPS signals and may be enhanced with some kind of barometric aiding. The more popular standard these days are the TSO C-145/146 standard receivers. The C-145/146 receivers are able to receive WAAS signals.
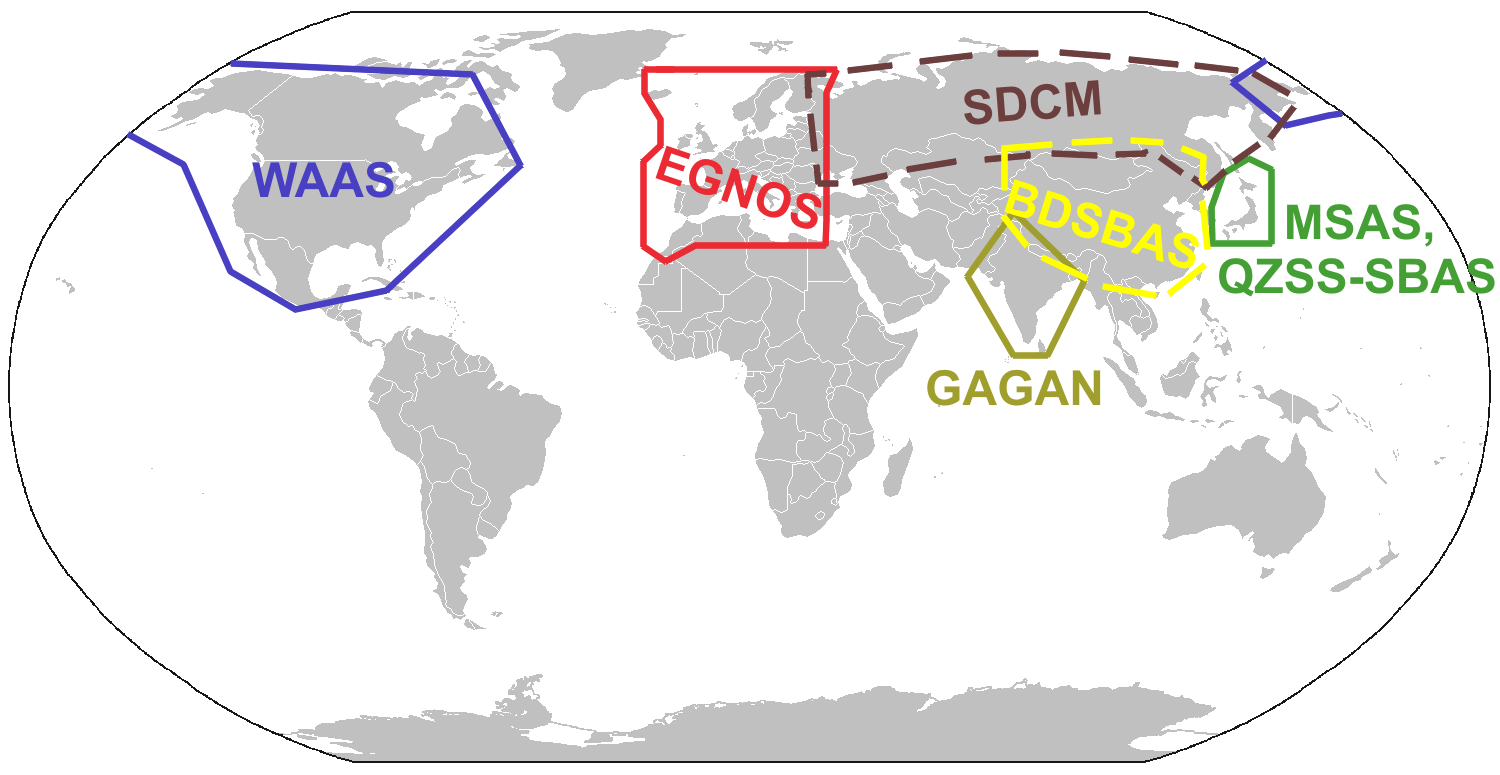
WAAS is a Satellite Based Augmenation System (SBAS). WAAS stands for Wide Area Augmentation System. WAAS is another satellite or constellation that broadcasts correction values to GPS receivers. The WAAS system has a few ground based systems at known locations measuring the difference from the GPS broadcast position and where the location really is. Receivers listening to the WAAS signal can adjust the calculated GPS position using the known difference to be more accurate.
Any aircraft flying relying completely on GPS navigation is required to make a pre-flight check. If the receiver is using the C-129 or C-196 standards, then a full RAIM prediction must be made. The above map at
http://www.raimprediction.net is sufficient. For aircraft using the C-145/146 standard receivers, then a check for GPS NOTAMs is required.
GPS Receiver Systems
A typical aviation GPS receiver is really a system. The GPS receiver can only tell you where it is. Typically the GPS receivers are connected to computers that are watching where they have been, and projecting where they are going. There is a function that can be used to smooth out the path, and predict where everyone is going called a
Kalman Filter. There is some mapping software that holds the location of most of the waypoints for the region. The computer is also connected to a display to the pilot can see where they are, and enter a flight plan.
Next time I will talk more about augmentation systems. The third part will be about RNP and ADS/B.
Thanks for reading, and I look forward to some feedback.
 Air is easily compressible, and that makes the formula a little more complicated, since you have to integrate pressure and stagnation values.
Air is easily compressible, and that makes the formula a little more complicated, since you have to integrate pressure and stagnation values.